Da mich Fluggeräte schon seit längerem fazinieren, habe ich mich dazu entschlossen, selber einen Quadrocopter zu bauen. Nachdem ich mich 2-3 Wochen in das Thema eingelesen habe, war es an der Zeit die benötigten Teile zu bestellen.
Von Anfang an war mir klar, dass ich eine MultiWii-Flugsteuerung einsetzen will, da es ein OpenSource Projekt ist und die Boards nicht sehr anders sind, als die Mikrocontroller-Boards, die ich sonst selber zusammenlöte. (ATmega basierend)
Für einen Quadrocopter braucht man folgende Grundkomponenten:
Rahmen: Diesen kann man selber aus z.B. Alu-Vierkantrohren bauen oder man kauft einen fertigen Rahmen. Ich habe mich für Letzteres entschieden, da ich nicht das richtige Werkzeug habe und für meinen ersten Quadrocopter so viele Fehlerquellen wie möglich ausschließen wollte. Mein Rahmen ist folgender: Frame X520D-SR M3
4 Motoregler (ESC): Diese müssen von der Leistung her auf die Motoren abgestimmt sein. Außerdem sollte man darauf achten, dass die Firmware SimonK bereits installiert ist oder aber ein nachträgliches Flashen möglich ist. Auch gut ist, wenn die Motorregler einen 5V Spannungsregler (BEC) eingebaut haben, so dass ein ESC die übrige Elektronik mit Strom versorgen kann. Meine Motoregler liefern 20 Ampere und der BEC 3 Ampere.
4 Motoren: Man verwendet bürstenlose Gleichstrommotoren mit ca. 1000 U/Min pro Volt. Ich habe die DT750.
4 Propeller: Hier gibt es viele verschiedene Größen, Formen und Materialen. Ein größerer Propeller erzeugt mehr Schub, braucht aber auch mehr Leistung. Wichtig ist die Kombination aus Gesamtgewicht, Motorleistung und Propellergröße. Bei 50% Gasgeben sollte der Quadrocopter bereits schweben, so dass eine gewisse Agilität vorhanden ist.
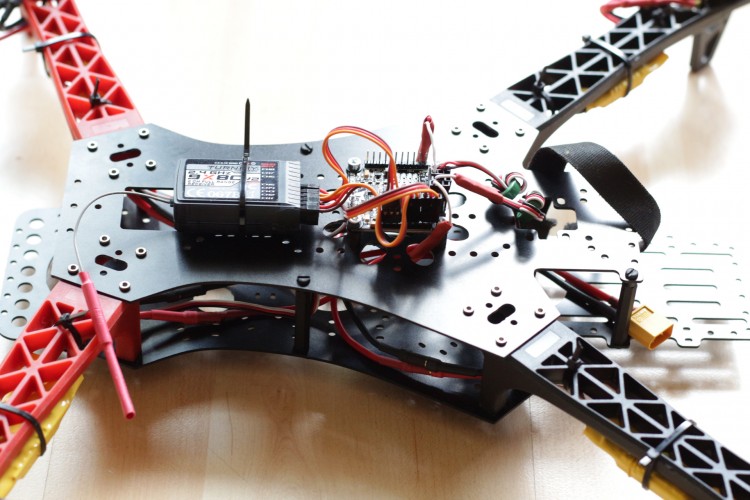
Flugsteuerung: Diese verarbeitet die Befehle vom Empfänger und Sensorwerte und gibt die richtigen Geschwindigkeiten per PWM an die Motoren weiter. Durch die verschiedenen Sensoren wie Beschleunigungssensor und Gyroskop kann die Flugsteuerung das Fluggerät stabil in der Luft halten. Ich habe eine schon nicht mehr ganz aktuelle Flugsteuerung gebraucht erworben und zwar die Crius SE 1.0. Sie hat einen ATmega 328P Controller, einen BMA180 Beschleunigungssensor, sowie ein ITG3205 Gyroskop. Bei einer Neuanschaffung würde ich euch raten, ein aktuelleres Board mit ATmega 2560 und MPU6050 Sensor zu kaufen.
Sender/Empfänger: Für die Funkbefehle braucht man natürlich eine Fernsteuerung + passenden Empfänger. In der Bucht habe ich mir relativ günstig die Turnigy 9X geschossen, da sie ein unschlagbares Preis-Leistungs-Verhältnis hat und es eine große Community rund um diese Funke gibt, die bereits alternative Firmware und allerhand Hacks und Mods hervorgebracht hat.
Akku: Üblich sind LiPo-Akkus. Ich habe mich für den Anfang für eine 3S (11,1V)Variante mit 2200 mAh entschieden. Wichtig ist die Entladerate, die mit einem C angegeben ist. Sie bestimmt, wie viel Strom man dem Akku konstant entziehen kann, ohne dass er überlastet wird. Mein Akku hat 30C; deshalb kann er konstant 66 Ampere (2,2 * 30) liefern. Das sollte für meine Motoren- Propellerkombination ausreichend sein.
Zusätzlich zu den Grundkomponenten habe ich noch folgende weitere Anschaffungen getätigt:
Akku-Ladegerät: Mit dem Hype X7 habe ich ein günstiges und solides Ladegerät erworben, das alle gängigen Akkus und natürlich auch LiPo’s laden kann.
LiPo Alarm: Um eine Tiefenentladung zu verhindern, steckt man dieses Gerät einfach an den Balancer-Anschluss des Akkus und es fängt an zu piepen, sobald eine Zelle unter eine Spannung von 3,3V fällt.
Wuchtungs-Gerät: Propeller sollten vor dem Flug gewuchtet werden, damit die Vibrationen abgemildert werden. Mein lokaler Modellbauladen hatte nur noch eine Wuchtungswelle vorrätig, aber auf 2 Gläser gelegt funktioniert es schon recht gut.
LiPo-Bag: LiPo-Akkus sind nicht ungefährlich. Sie können bei Beschädigung oder Überbelastung in Brand geraten. Um sicher zu gehen, habe ich mir für den Ladevorgang und das Lagern lieber einen solchen Sack zugelegt.
Schrauben-Sicherungslack: Da sich die Schrauben und Muttern bei den Vibrationen lösen können, sollte man sie mit Sicherungslack davor schützen.
Stromverteiler: Irgendwie muss man die 4 Motoregler mit dem Akku verbinden. Man kann entweder alle Anschlüsse miteinander verlöten oder man benutzt ein Stromverteiler-Board/Kabel. Da ich alle Komponenten steckbar haben wollte, habe ich mich für ein Kabelverteiler entschieden.
3,5mm Goldkontakte: Wie gesagt wollte ich alles steckbar haben und da die Motorregler und Motoren leider keine Kontakte hatten, musste ich die Kontakte noch selber dran löten.


Schreibe einen Kommentar